
Touch Recognition on Complex 3D Printed Surfaces using Filter Response Analysis
Valkov, D., Thiele, S., Huesmann, K., Gebauer, E. and Risse, B.
IEEE VRW 2021
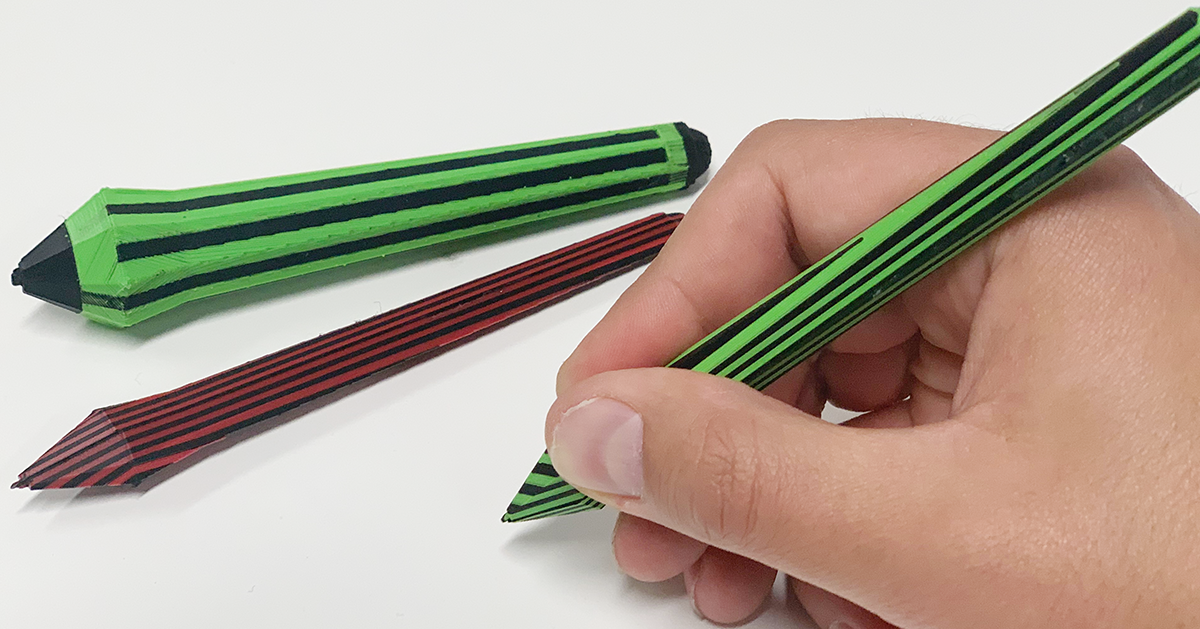
A novel method for sensing touch input on Complex 3D printed objects
Valkov, D., Thiele, S., Huesmann, K., Gebauer, E. and Risse, B.
IEEE VRW 2021
A novel method for sensing touch input on Complex 3D printed objects